9.9 3D Pose Estimation
Docker usage reference: Module 3.7 Docker
Isaac ROS 3D pose estimation official link: https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_centerpose/index.html
Overview
Isaac ROS Pose Estimation includes three main ROS 2 packages for 6-DoF object pose workflows. The table below summarizes the differences between them.
| Package | Novel object without retraining | TAO support | Relative speed | Relative quality | Best fit |
|---|---|---|---|---|---|
isaac_ros_foundationpose | Yes | N/A | Fast | Best | Zero-shot pose estimation and tracking for unseen objects |
isaac_ros_dope | No | No | Fastest | Good | Mature, lightweight pose estimation for known objects |
isaac_ros_centerpose | No | Yes | Faster | Better | Known-object pose estimation with NVIDIA TAO training support |
These packages use GPU to accelerate DNN reasoning to estimate the object's attitude. The sensor function can use output predictions to integrate with the corresponding depth, thus providing the 3D attitude and distance of the object for navigation or operation.
Quick Start
In order to simplify development, we mainly use Isaac ROS Dev Docker images and perform impact demonstrations on them. The demonstration does not require the installation of any camera device to simulate data streams from the camera by playing the rosbag file.
If you plan to run the workflow on real hardware or with a connected camera, refer to the official Isaac ROS documentation for supported camera setups.
Open a terminal, move into the workspace, and enter the Isaac ROS development container.
cd ${ISAAC_ROS_WS}/src
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.shRun the following launch command:
ros2 launch isaac_ros_examples isaac_ros_examples.launch.py launch_fragments:=centerpose,centerpose_visualizer interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_centerpose/quickstart_interface_specs.json model_name:=centerpose_shoe model_repository_paths:=[${ISAAC_ROS_WS}/isaac_ros_assets/models]Open a second terminal and enter the container.
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.shRun the following command:
ros2 bag play -l ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_centerpose/quickstart.bagView the Result
Open the third terminal and enter the container.
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.shRun the following command to view the result:
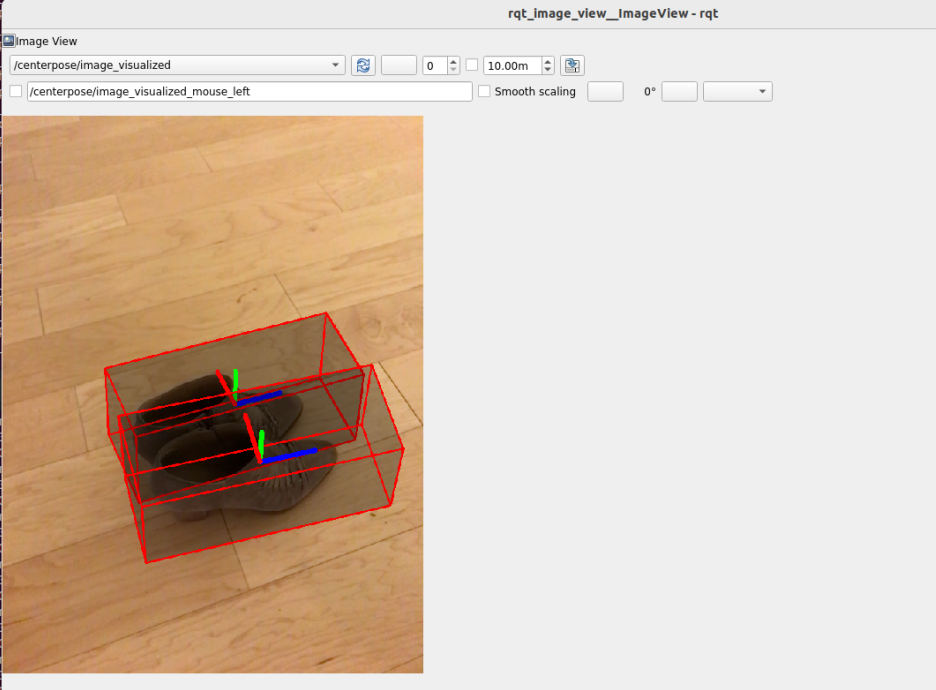
ros2 run rqt_image_view rqt_image_view /centerpose/image_visualized