9.4 Free Space Segmentation
Docker usage reference: Module 3.7 Docker
Isaac ROS Free Space Division Network link: https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_freespace_segmentation/index.html
Overview
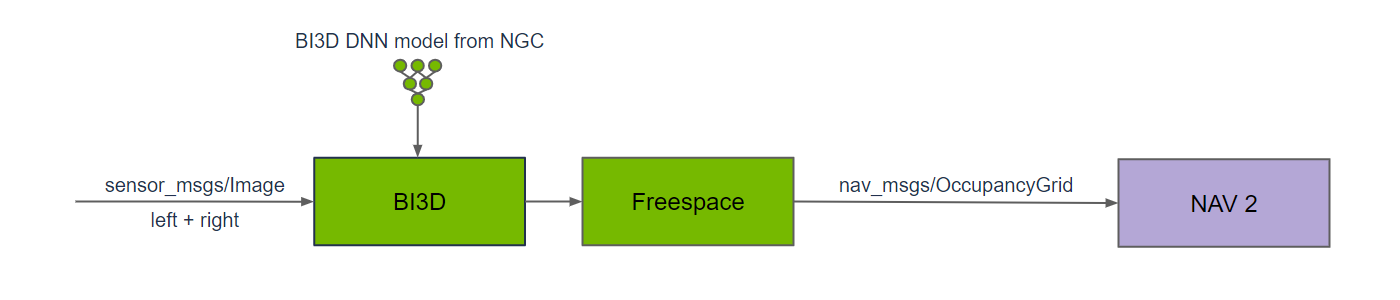
Isaac ROS free space partition contains a ROS 2 package to generate a navigational occupancy grid. Bi3D Free Space creates an occupied grid for Nav2 by handling free space masks containing robotics relative to the surface to avoid barriers in navigation. The package is accelerated by GPU and provides real-time, low-delayed results in robotic applications. Bi3D Free Space provides an additional occupancy grid source for mobile robots (ground robots).
Quick Start
In order to simplify development, we mainly use Isaac ROS Dev Docker images and perform impact demonstrations on them. The demonstration does not require the installation of any camera device to simulate data streams from the camera by playing the rosbag file.
Note: If you want to be installed on your own equipment or to connect the camera to develop other features, please refer to the Isaac ROS official network to connect the camera with the specified model of Yveida.
Open a terminal, move into the workspace, and enter the Isaac ROS development container.
cd ${ISAAC_ROS_WS}/src
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.shRun the command below.
ros2 launch isaac_ros_examples isaac_ros_examples.launch.py \
launch_fragments:=bi3d,bi3d_freespace \
interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_bi3d_freespace/rosbag_quickstart_interface_specs.json \
featnet_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/bi3d_proximity_segmentation/featnet.plan \
segnet_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/bi3d_proximity_segmentation/segnet.plan \
max_disparity_values:=10Open a second terminal and enter the container.
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.shRun the following command:
ros2 bag play -l ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_bi3d_freespace/quickstart.bagView the Result
Open the third terminal and enter the container.
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.shRun the following command to view the result:
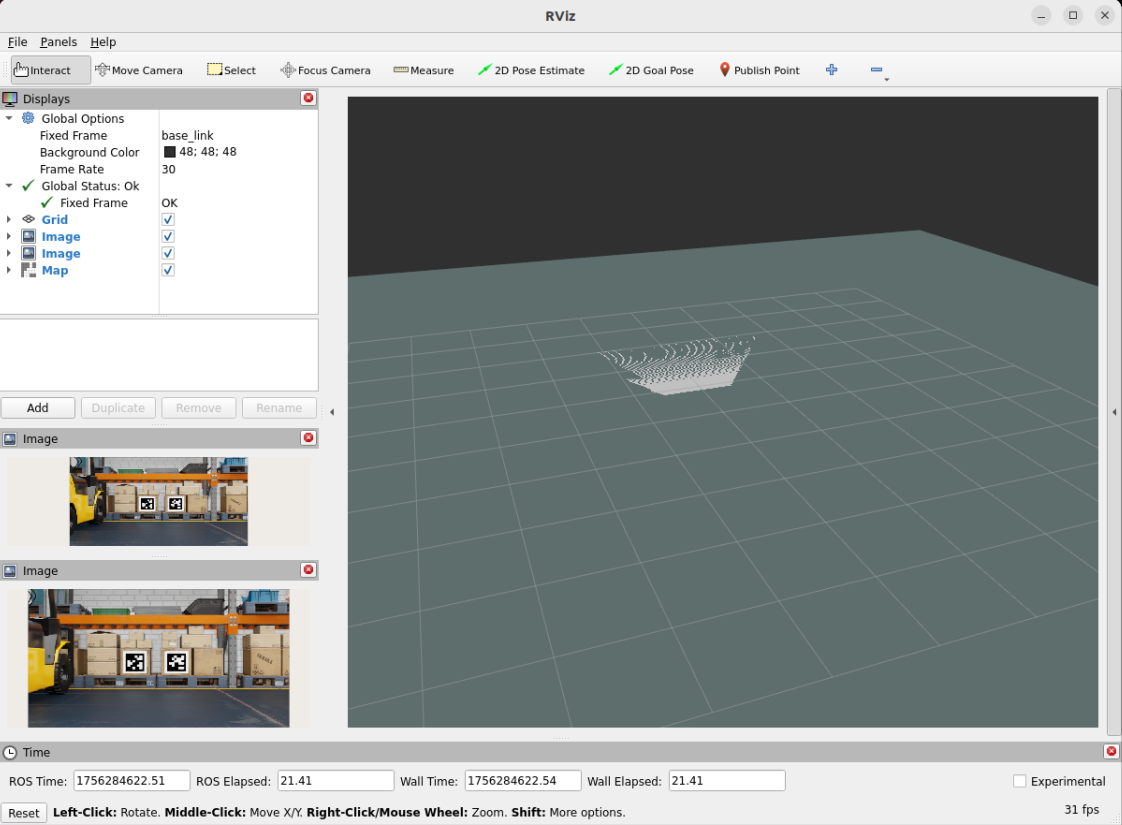
rviz2